摘要
维护一个一致性的环境稠密地图对于机器人进行高层次决策是重要的。然而,在长时空的建图过程中,累积漂移误差将导致地图不一致性。本文提出了一个新的稠密建图方法,解决建图一致性挑战的时候实现了可扩展性。我们方法的中心是将环境表示为一个TSDF子地图的集合。这些子地图通过基于特征的相机跟踪和BA优化进行定位。我们的主要贡献在于一个能够识别地图中稳定区域的pipeline,以及对子地图的融合。所提出的方法使得我们在降低地图增长的同时保持了一致性。我们在公共数据集上证明了我们方法的有效性。
引言
稀疏地图是目前主要SLAM方法所采取的地图形式,但是不适用于机器人任务执行。稠密建图能够提供任务执行所需要的环境信息但是受到漂移误差的影响,容易产生不一致的环境表达。
本文提出c-blox,一种新的建图方法能够使得地图具有一致性和可扩展性。本文将环境表示为相互重叠的TSDF子地图集合,对于每个子地图,限制其体素变形的程度,针对地图规模随着环境规模上升而增大的问题,通过子地图融合限制地图的增长。首先基于特征共视关系识别包含潜在冗余视角的子地图,然而判断这些候选子地图是否相比于另外一个具有准确的相对位置关系。这种certain measure是在同步构建的稀疏地图中提取得到的。
本文的贡献:
- 一种新的TSDF地图
- 基于CPU的建图方法
- the addition of threading infrastructure and an approximate fast intergrator to the open-source TSDF library Voxblox
相关工作
总的来说,目前的稠密建图方法在解决地图一致性问题上存在的挑战如下:(1) 所维护的地图的形式需要后续的进一步的处理,比如,点云地图和surfel地图,或者关键帧深度图;(2) 将新的信息融入到先前的地图中存在困难,例如mesh-based表达方法;(3) 在重建过程中的全局优化中使用离线或者计算代价较高的技术;(4) 构建的地图的尺寸增长没有界限,就算在限定的环境中也是如此。
本文的工作主要针对上述挑战,提出一种有效的解决方案。
系统框架
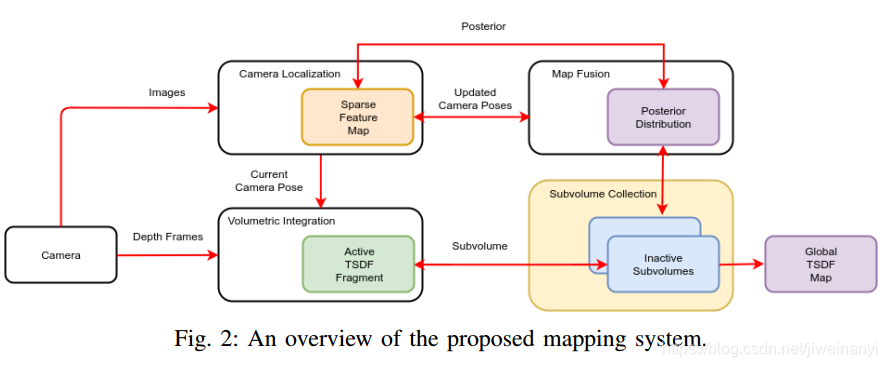
系统
在将观测数据融合到一个地图中的时候,传感器的定位误差会导致数据融合的不一致性。尤其在稠密地图中,这种误差很难被及时回复,因为观测和定位信息之间的关联通常丢失了,为了保证建图的效率。我们将环境表示为一个局部地图构成的集合,但是我们不对全局空间进行划分,使得地图和环境之间存在多对一的关系。保持环境结构的多假设对于维护地图一致性具有重要优势,使得能够在conflcit被消除之前维护独立的地图。
每个TSDF子地图对环境中的小部分区域进行表达,整个环境是这些子地图的集合。每个子地图有一个局部的坐标系。在子地图上三种操作包括:(1) 增加一个新的子地图;(2) 修正子地图的位姿;(3) 将一个子地图与另外一个子地图进行融合。
相机定位
本文使用稀疏的,基于特征的SLAM方法用来提供当前传感器的位姿,并对历史的位姿进行更新。传统的TSDF系统依赖于深度信息的注册进行相机跟踪,但是,在本文的方法中,基于稀疏特征的定位方法提供两个优势:现在的稀疏建图系统在CPU上能够高效运行,使得可以应用到轻量级的机器人系统中;(2) 一个稀疏特征地图能够保持定位信息和环境之间的关联关系,能够进行基于概率的决策。
本文使用ORB-SLAM2作为框架。
体素融合
新观测到的图像数据融合到子地图集合中。我们首先将估计的传感器位姿,变换到当前活动的子地图的坐标系中。
周期性的,一个新的子TSDF地图被创建,标记为active。最后一个active子地图被转移到集合中,使得地图增长。一个子地图与第一个关键帧是严格关联在一起的,二者的使用同一个坐标系。我们假设在一个子地图中的数据是一致的。Therefore our approach is to generate new subvolumes early and often, relying on the map fusion module to ameliorate the scalability cost of doing so. 我们选择创建一个新的子地图按照下述条件:属于一个子地图的关键帧的数量达到了最大值;或者稀疏特征地图中出现了较大的变化,导致在相机跟踪中产生了跳变。
地图融合
主要是基于闭环的校正。