Note 10 ���ؿ��巨��ʱ����ѧϰ Monte Carlo and Temporal Difference
���ؿ��巨��ʱ����ѧϰ
- Note 10 ���ؿ��巨��ʱ����ѧϰ Monte Carlo and Temporal Difference
-
- 10.1 ���ؿ��巨��ʱ����ѧϰ (Monte Carlo and Temporal Difference)
- 10.2 Q�е�TDѧϰ��TD Learning in QQQ ��
- 10.3 �ʸ�Eligibility trace��
- 10.4 ʵ��:���������е����ؿ������������TD(0)\mathrm{TD}(0)TD(0)�㷨
-
- 10.4.1 �����
- 10.4.2 Task 1: DP �㷨
- 10.4.3 Task 2: ���ؿ���MC�㷨
- 10.4.4 Task 3: ʱ�����㷨TD(0)
- 10.4.5 SARSA ��Q-learning
ǰ�漸���ص������˽��DP�е�ά���������⣬��ǿ����ϵͳ��̬����MDPģ���е�״̬ת�����ʣ�����������˵�ǿ�����ȫ���ʵġ����ҵ��ǣ������ļ����ڴ��������Ӧ�����Dz���ʵ�ġ���ˣ����������RL\mathrm{RL}RL����Ҫ���㣬��ʱ����ΪDP�е�ģ������(curse of model)��
�����о��˿���˵�����������ģ��RL�㷨����ʱ���֣�Temporal Difference�� TD��ѧϰ��������˵�����������ڵ�10.1����������TDѧϰ�Ĵ�ͳ����ʽ�۵㣬�ڵ�10.2������չ��TD�ĸ����Է�չ������SARSASARSASARSA��QQQѧϰ�㷨�����ڵ�10.3���з�չ���ʸ��ٵĸ��������TD�㷨�ļ���Ч�ʡ�
10.1 ���ؿ��巨��ʱ����ѧϰ (Monte Carlo and Temporal Difference)
ʱ��ĸ���һֱ���о���Ӧ��RL�����ġ��������ڳɹ�������1959��ļ�������������ҵ���������ʮ��ķ�չ���������ۿ�ʼ����һ�£�����Richard Sutton��1980����ڼ������ѧ�ı��������������TDѧϰ�Ĵ�ͳ��չ��ѧϰ����Ϊ�����еõ���ǿ�ҵ������������ڵ��ص���Ϊ��������ṩһ��ֱ�۵ġ��������ϼ��Ľ��ܡ�
�����Ǵ�����Χ���ʼ���ع�һ�¸�����ȷ���Բ��Ե�����Χ������ܳɱ������Ķ��壨��RL�б���Ϊ�ر����������߽��������������ǽ�һ���켣�����гɱ�֮�Ͷ���Ϊ
G��(x0):=gN(xN)+��k=0N?1gk(xk,uk,xk+1)(10.1)G_{\pi}\left(x_{0}\right):=g_{N}\left(x_{N}\right)+\sum_{k=0}^{N-1} g_{k}\left(x_{k}, u_{k}, x_{k+1}\right) \tag{10.1}G��?(x0?):=gN?(xN?)+k=0��N?1?gk?(xk?,uk?,xk+1?)(10.1)
����Ա���Ϊһ�������������ô�ܳɱ�����������дΪ
J��(x0):=Ep��(��,��)[G��(x0)](10.2)J^{\pi}\left(x_{0}\right):=\mathbb{E}_{p_{\pi}(\chi, \mu)}\left[G_{\pi}\left(x_{0}\right)\right] \tag{10.2}J��(x0?):=Ep��?(��,��)?[G��?(x0?)](10.2)
�������ܶȺ���p��(��,��)p_{\pi}(\chi, \mu)p��?(��,��)û�и���ʱ��һ��ʵ�õĽ�������Dz������ؿ��巽����Ҳ����˵, ��ʽ(10.2)�е�����ֵ����ͨ�������ľ���ƽ��ֵ������Ϊ
J��(x0)��J^��(x0):=1N��i=1NG��(i)(x0)(10.3)J^{\pi}\left(x_{0}\right) \approx \widehat{J}^{\pi}\left(x_{0}\right):=\frac{1}{N} \sum_{i=1}^{N} G_{\pi}^{(i)}\left(x_{0}\right) \tag{10.3}J��(x0?)��J
��(x0?):=N1?i=1��N?G��(i)?(x0?)(10.3)
����ϱ�(i)(i)(i)ָ���Dz����켣�����������ݴ������ɣ�������ֵ��ȷ������Ҫ��������������㹻����Ȼ������ΧNNN�ܴ�ʱ����������һ������ƽ��ֵ���÷dz�������ˣ�ʵ��Ҫ����һ�����߸��£���������ƽ����������������ʽ��Ч���㡣
����������
��{xi}i=1��\left\{x_{i}\right\}_{i=1}^{\infty}{ xi?}i=1��?��һ������ͬ�ֲ�������������Ӷ� E[xi]=��\mathbb{E}\left[x_{i}\right]=\muE[xi?]=�� and Var?(xi)<��\operatorname{Var}\left(x_{i}\right)<\inftyVar(xi?)<�� , ��ô�������Կ϶�1n(x1+��+xn)����,when n����\frac{1}{n}\left(x_{1}+\ldots+x_{n}\right) \rightarrow \mu, \quad \text { when } n \rightarrow \inftyn1?(x1?+��+xn?)����, when n����
���ؿ��巽����
�κ�ʹ������Ժʹ�������������ij�������ķ���������������صķ����������ؿ��巽����
Ϊ�˿���������ɣ����������������������˵��������x��Rx\in \mathbb{R}x��R��һ��������������й̶��ֲ�p(x)p(x)p(x)��xix_{i}xi?�Ǵ�p(x)p(x)p(x)�г�ȡ�Ķ���ͬ�ֲ�����������ô��nnn�����ľ���ƽ�����ɼ���Ϊ��������ƽ����
x^n=1n��i=1nxi(10.4)\widehat{x}_{n}=\frac{1}{n} \sum_{i=1}^{n} x_{i} \tag{10.4}x n?=n1?i=1��n?xi?(10.4)
����һ���µ�����xn+1x_{n+1}xn+1?��n+1n+1n+1�����ľ���ƽ��ֵ���Խ�һ�����¼���Ϊ
x^n+1=1n+1��i=1n+1xi=1n+1(��i=1nxi+xn+1)=1n+1(nx^n+x^n+xn+1?x^n)=x^n+1n+1(xn+1?x^n).(10.5)\begin{aligned} \widehat{x}_{n+1} &=\frac{1}{n+1} \sum_{i=1}^{n+1} x_{i} \\ &=\frac{1}{n+1}\left(\sum_{i=1}^{n} x_{i}+x_{n+1}\right) \\ &=\frac{1}{n+1}\left(n \widehat{x}_{n}+\widehat{x}_{n}+x_{n+1}-\widehat{x}_{n}\right) \\ &=\widehat{x}_{n}+\frac{1}{n+1}\left(x_{n+1}-\widehat{x}_{n}\right) . \end{aligned} \tag{10.5}x
n+1??=n+11?i=1��n+1?xi?=n+11?(i=1��n?xi?+xn+1?)=n+11?(nx
n?+x
n?+xn+1??x
n?)=x
n?+n+11?(xn+1??x
n?).?(10.5)
��Ȼ��n+1n+1n+1�����ľ���ƽ����x^n+1\widehat{x}_{n+1}x
n+1?���Լ�����֮ǰ��nnn�����Ĺ���x^n\widehat{x}_{n}x
n?���µĹ۲�ֵxn+1x_{n+1}xn+1?�����¡���ˣ���������Χ���⣬�ܳɱ�����J��J^{\pi}J������ͨ��Ӧ�����¸��¹��������߹���
Jk+1(x0)=Jk(x0)+1k(G��(k+1)(x0)?Jk(x0))(10.6)J_{k+1}\left(x_{0}\right)=J_{k}\left(x_{0}\right)+\frac{1}{k}\left(G_{\pi}^{(k+1)}\left(x_{0}\right)-J_{k}\left(x_{0}\right)\right) \tag{10.6}Jk+1?(x0?)=Jk?(x0?)+k1?(G��(k+1)?(x0?)?Jk?(x0?))(10.6)
����ָ��kkkָ������x0x_{0}x0?��ʼ�������켣����������һ���¹���Ϊ����Χ��������ؿ������������Monte Carlo policy evaluation�� �㷨��
��Ȼ����������Χ������˵���������켣���г����ĸ����Ѿ��������ˡ�Ȼ����ͨ��̽��ͬ���ļ��ɣ��������������Χ�����µĵ�TDѧϰ�㷨�����Դ�����ʽ��˼������������û�����ü�ֵ�����Ķ��壬���ǽ�ÿ������״̬�ı����������滻Ϊ
J��(x)=Ep��(x��Ox)[g(x,��(x),x��)+��J��(x��)].(10.7)J^{\pi}(x)=\mathbb{E}_{p_{\pi}\left(x^{\prime} \mid x\right)}\left[g\left(x, \pi(x), x^{\prime}\right)+\gamma J^{\pi}\left(x^{\prime}\right)\right] . \tag{10.7}J��(x)=Ep��?(x���Ox)?[g(x,��(x),x��)+��J��(x��)].(10.7)
���ڶ��ܳɱ�����J��RKJ \in \mathbb{R}^{K}J��RK�Ĺ��ƣ������µĺ�g(x,u,x��)+��J(x��)g\left(x, u, x^{\prime}\right)+\gamma J\left(x^{\prime}\right)g(x,u,x��)+��J(x��)���Ա����Ƶص���һ�� ���������������������xxx��x��x^{\prime}x���ֱ��ʾһ����ʼ״̬����������״̬��Ȼ��ͨ���������¹������ͬ���ɣ����Եó����¸��¹���
Jk+1(x)=Jk(x)+��k(g(x,u,x��)+��Jk(x��)?Jk(x)),(10.8)J_{k+1}(x)=J_{k}(x)+\alpha_{k}\left(g\left(x, u, x^{\prime}\right)+\gamma J_{k}\left(x^{\prime}\right)-J_{k}(x)\right), \tag{10.8}Jk+1?(x)=Jk?(x)+��k?(g(x,u,x��)+��Jk?(x��)?Jk?(x)),(10.8)
����u=��(x)u=\pi(x)u=��(x), ��k>0\alpha_{k}>0��k?>0����Ϊѧϰ�ʡ��ø��¹���ΪTDѧϰ��������㷨11��

����ʽ����
��(x,u,x��):=g(x,u,x��)+��Jk(x��)?Jk(x)(10.9)\delta\left(x, u, x^{\prime}\right):=g\left(x, u, x^{\prime}\right)+\gamma J_{k}\left(x^{\prime}\right)-J_{k}(x) \tag{10.9}��(x,u,x��):=g(x,u,x��)+��Jk?(x��)?Jk?(x)(10.9)
ͨ������ΪTD��
��Ҫע����ǣ���ʽ��10.8���ж����TD���²������ؿ��巽������Ϊ�ܳɱ�����JkJ_{k}Jk?ֻ���ܳɱ�����J��J^{\pi}J���Ĺ��ƣ����g(x,u,x��)+��Jk(x��)g\left(x, u, x^{\prime}\right)+\gamma J_{k}\left(x^{\prime}\right)g(x,u,x��)+��Jk?(x��)����ij����������ļ������������仰˵��TD���¹���������һ�����ƵĻ����ϲ���һ�����ơ����ּ�����RL�ı����±���Ϊ������(bootstrapping )����Ϊ������ѧϰ��ͨ����ѡ��Ϊ��k��(0,1)\alpha_{k}\in(0,1)��k?��(0,1)���Բ��������������DZ�ڲ������������˵��ѧϰ��ͨ������Robbins-Monro������������Ӧѧϰ�ʵ��������[33]������
��k=1�ަ�k=��,and ��k=1�ަ�k2<��(10.10)\sum_{k=1}^{\infty} \alpha_{k}=\infty, \text { and } \sum_{k=1}^{\infty} \alpha_{k}^{2}<\infty \tag{10.10}k=1����?��k?=��, and k=1����?��k2?<��(10.10)
һ������Robbins-Monro������ѧϰ�ʵļ�������
��k=1k,for k��N(10.11)\alpha_{k}=\frac{1}{k}, \quad \text { for } k \in \mathbb{N} \tag{10.11}��k?=k1?, for k��N(10.11)
��ô��ʽ��10.10���еĵ�һ���ͳ�Ϊг�����еĺͣ���֪���н�ģ�����ʽ��10.10���еĵڶ�������ָ���������⣬��֪���н�ġ�
ͼ16������TDѧϰ�㷨�����ؿ�����������㷨֮�������

ͼ16�����ؿ����TD�㷨�ıȽϡ�TD�㷨���������е�״̬���������˹�ȥ���ʹ�������״̬����Monte Carlo�㷨ֻ�ڴﵽ�ն�״̬ʱ�Ÿ��������е�״̬��
��Ȼ��TDѧϰ�㷨�����˹�ȥ���ʹ�������״̬�������ؿ����㷨ֻ��������ʼ״̬������TDѧϰ�������ؿ��巽��������Ȥ����ע�TDѧϰ�㷨�������������ܳɱ�����J��J^{\pi}J�����������ص��������ݽ�����һ���ṩ��
10.2 Q�е�TDѧϰ��TD Learning in QQQ ��
��TD(0)\mathrm{TD}(0)TD(0)�㷨�ķ�չ���ƣ�������Ӧ�Ĵ���QQQ������TDѧϰ�㷨Ҳ����ֱ�ӷ�չΪ
Qk+1(x,u)=Qk(x,u)+��k(g(x,u,x��)+��Qk(x��,u��)?Qk(x,u)),(10.12)Q_{k+1}(x, u)=Q_{k}(x, u)+\alpha_{k}\left(g\left(x, u, x^{\prime}\right)+\gamma Q_{k}\left(x^{\prime}, u^{\prime}\right)-Q_{k}(x, u)\right), \tag{10.12}Qk+1?(x,u)=Qk?(x,u)+��k?(g(x,u,x��)+��Qk?(x��,u��)?Qk?(x,u)),(10.12)
����u��=��(x��)u^{\prime}=\pi\left(x^{\prime}\right)u��=��(x��)������
Qk+1(x,u)=Qk(x,u)+��k(g(x,u,x��)+��min?u��Qk(x��,u��)?Qk(x,u)).(10.13)Q_{k+1}(x, u)=Q_{k}(x, u)+\alpha_{k}\left(g\left(x, u, x^{\prime}\right)+\gamma \min _{u^{\prime}} Q_{k}\left(x^{\prime}, u^{\prime}\right)-Q_{k}(x, u)\right) . \tag{10.13}Qk+1?(x,u)=Qk?(x,u)+��k?(g(x,u,x��)+��u��min?Qk?(x��,u��)?Qk?(x,u)).(10.13)
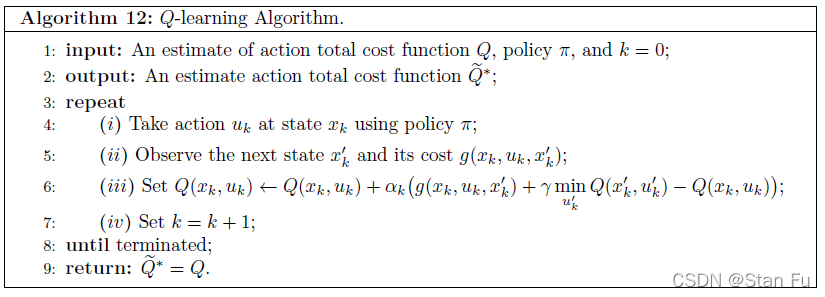
ǰ�ߵĸ��¹���ΪSARSAS A R S ASARSA�㷨����ִ�в�����\pi���IJ��������������߱���ΪQ-ѧϰ�㷨���㷨12�������������״̬-�ж��ܳɱ�����Q?Q^{*}Q?��
��һ�½��ṩ������ЩTDѧϰ�㷨�Ľ��������ĸ������ۡ�
10.3 �ʸ�Eligibility trace��
�ڵ�10.1�ڣ����������TDѧϰ���������ʽֱ���������㷨����ԭʼ��TD�������һ����Ҫ���㡣
Ҳ����˵����һ��TD���������Ļ�������ʱ��������ֻ������Ӧ״̬���ܳɱ��������ر��ǣ���״̬��������þ�ʱ������ά�ȵ����䣬TD�㷨��Ч�������dz��͡���ˣ���Ҫһ��ʵ�õļ������������������价��֮��һ�λ����ж��״̬���ܳɱ�������
�ʸĸ������ͨ������10.1���п���TD�㷨����ͬ����Ӧ����mmm����������������չ�������ǻع�һ�¹�ʽ��4.33���е�mmm������������T��m\mathrm{T}_{\pi}^{m}T��m?���������·�ʽ��ʾһ�����켣
hx0(m):={x0,u0,��,xm?1,um?1,xm}.(10.14)h_{x_{0}}^{(m)}:=\left\{x_{0}, u_{0}, \ldots, x_{m-1}, u_{m-1}, x_{m}\right\} . \tag{10.14}hx0?(m)?:={ x0?,u0?,��,xm?1?,um?1?,xm?}.(10.14)
��ô��mmm�����������ӵļ��㷽��Ϊ
T��mJ(x0)=Ep��(h(m))[��k=0m?1��kg(xk,uk,xk+1)+��mJ(xm)?=:G��(hx0(m))],(10.15)\mathrm{T}_{\pi}^{m} J\left(x_{0}\right)=\mathbb{E}_{p_{\pi}\left(h^{(m)}\right)}[\underbrace{\sum_{k=0}^{m-1} \gamma^{k} g\left(x_{k}, u_{k}, x_{k+1}\right)+\gamma^{m} J\left(x_{m}\right)}_{=: G_{\pi}\left(h_{x_{0}}^{(m)}\right)}], \tag{10.15}T��m?J(x0?)=Ep��?(h(m))?[=:G��?(hx0?(m)?) k=0��m?1?��kg(xk?,uk?,xk+1?)+��mJ(xm?)??],(10.15)
���к�G��(hx0(m))G_{\pi}\left(h_{x_{0}}^{(m)}\right)G��?(hx0?(m)?)��RL�ı�����ͨ������Ϊmmm���ķ��ء������Ϳ���ֱ�ӵõ�һ��mmm����TDѧϰ�㷨����
Jk+1(x0)=Jk(x0)+��k(G��(hx0(m))?Jk(x0))(10.16)J_{k+1}\left(x_{0}\right)=J_{k}\left(x_{0}\right)+\alpha_{k}\left(G_{\pi}\left(h_{x_{0}}^{(m)}\right)-J_{k}\left(x_{0}\right)\right) \tag{10.16}Jk+1?(x0?)=Jk?(x0?)+��k?(G��?(hx0?(m)?)?Jk?(x0?))(10.16)
�����ԣ��������㷨�������൱��Ч�ġ�Ҳ����˵���������mmm�ܴ��ڽ��������л��кܳ�һ��ʱ��û�и��¡�������������ϸ����mmm��TD���»�mmm��TD���Ϊ
G��(hx0(m))?J(x0)=��k=0m?1��kg(xk,uk,xk+1)+��mJ(xm)?J(x0)=��k=0m?2��kg(xk,uk,xk+1)+��m?1(g(xm?1,um?1,xm)+��J(xm))??��m?1J(xm?1)+��m?1J(xm?1)?J(x0)=��k=0m?2��kg(xk,uk,xk+1)+��m?1J(xm?1)?J(x0)+��m?1��(xm?1,um?1,xm)=��k=0m?1��k��(xk,uk,xk+1),(10.17)\begin{aligned} &G_{\pi}\left(h_{x_{0}}^{(m)}\right)-J\left(x_{0}\right)\\ &=\sum_{k=0}^{m-1} \gamma^{k} g\left(x_{k}, u_{k}, x_{k+1}\right)+\gamma^{m} J\left(x_{m}\right)-J\left(x_{0}\right)\\ &=\sum_{k=0}^{m-2} \gamma^{k} g\left(x_{k}, u_{k}, x_{k+1}\right)+\gamma^{m-1}\left(g\left(x_{m-1}, u_{m-1}, x_{m}\right)+\gamma J\left(x_{m}\right)\right)-\\ &-\gamma^{m-1} J\left(x_{m-1}\right)+\gamma^{m-1} J\left(x_{m-1}\right)-J\left(x_{0}\right)\\ &=\sum_{k=0}^{m-2} \gamma^{k} g\left(x_{k}, u_{k}, x_{k+1}\right)+\gamma^{m-1} J\left(x_{m-1}\right)-J\left(x_{0}\right)+\gamma^{m-1} \delta\left(x_{m-1}, u_{m-1}, x_{m}\right)\\ &=\sum_{k=0}^{m-1} \gamma^{k} \delta\left(x_{k}, u_{k}, x_{k+1}\right), \end{aligned}\tag{10.17} ?G��?(hx0?(m)?)?J(x0?)=k=0��m?1?��kg(xk?,uk?,xk+1?)+��mJ(xm?)?J(x0?)=k=0��m?2?��kg(xk?,uk?,xk+1?)+��m?1(g(xm?1?,um?1?,xm?)+��J(xm?))??��m?1J(xm?1?)+��m?1J(xm?1?)?J(x0?)=k=0��m?2?��kg(xk?,uk?,xk+1?)+��m?1J(xm?1?)?J(x0?)+��m?1��(xm?1?,um?1?,xm?)=k=0��m?1?��k��(xk?,uk?,xk+1?),?(10.17)
����mmm��TD���¿��Ա�����Ϊ��ʱ��仯���ۿ۵�TD���֮�͡���Ϊ��ƪ����ʽ(10.16)(10.16)(10.16)�е�mmm��TDѧϰ���¿�����дΪ
J(x0)=J(x0)+��(��k=0m?1��k��(xk,uk,xk+1))(10.18)J\left(x_{0}\right)=J\left(x_{0}\right)+\alpha\left(\sum_{k=0}^{m-1} \gamma^{k} \delta\left(x_{k}, u_{k}, x_{k+1}\right)\right) \tag{10.18}J(x0?)=J(x0?)+��(k=0��m?1?��k��(xk?,uk?,xk+1?))(10.18)
����mmm���ĸ��±���ʾΪ��ʱ��仯�ļ����ۿ۵�TD�������ǿ���һ��x0,x1,x2,��,xmx_{0}, x_{1}, x_{2}, \ldots, x_{m}x0?,x1?,x2?,��,xm?����ʷ��һ��ֱ�ӵ�ʵ�ֽ���ִ�и��£�һ���ﵽmmm������Ȼ�������IJ�����Ȼ�Dz���ʵ�ʵġ�ͨ���۲�ÿ��TD���Ĵ�Сȡ������ʼʱ�䲽��͵�ǰ����֮���ʱ�䲽�裬��������һ������״̬��ʱ��仯�ı���ֵ��������Ϊ�ʸ�eligibility trace����
�����dz�ʼ��ʱ�䲽��t=0t=0t=0�����趨et(x)=0e_{t}(x)=0et?(x)=0��������x��Xx \in \mathcal{X}x��X���ڴ�xtx_{t}xt?��xt+1x_{t+1}xt+1?��һ��ת��֮�����е��ʸ�������Ϊ
et(x):={��et?1(x),if x��xt1,if x=xt(10.18)e_{t}(x):= \begin{cases}\gamma e_{t-1}(x), & \text { if } x \neq x_{t} \\ 1, & \text { if } x=x_{t}\end{cases} \tag{10.18}et?(x):={
��et?1?(x),1,? if x��?=xt? if x=xt??(10.18)
���ֲ���ͨ������Ϊ�滻����replacing trace������Ӧ���㷨ͨ������ΪTD?(1)\operatorname{TD}(1)TD(1)�㷨��������Ǽ����ɽ�����������������Ʒ����Ǹ�̬�����ģ���ô�ظ����ʵ�״̬���ʸ�����Ƶ�������á����仰˵����������ͻ���֮��Ļ�����������ʱ��TD(1)\mathrm{TD}(1)TD(1)�㷨��ͬʱ�������б�����״̬�ļ�ֵ������
��������ĸ�����Խ�һ����չ����ʽ��5.10���ж������\lambda��-����ƽ���ı��������ӡ�ͨ����Ϲ�ʽ��10.17���и�����mmm��TD����ʽ��5.10���ж������\lambda������ƽ�����ڳ�ʼ״̬x0x_{0}x0?����\lambda������ƽ��TD���¿��Ա���ʾΪ
J(x0)=J(x0)+��k(��k=0�ަ�k��t=0k��t��(xt,ut,xt+1))(10.19)J\left(x_{0}\right)=J\left(x_{0}\right)+\alpha_{k}\left(\sum_{k=0}^{\infty} \lambda^{k} \sum_{t=0}^{k} \gamma^{t} \delta\left(x_{t}, u_{t}, x_{t+1}\right)\right) \tag{10.19}J(x0?)=J(x0?)+��k?(k=0����?��kt=0��k?��t��(xt?,ut?,xt+1?))(10.19)
�������˵�������ǿ���{x0,u0,��,xm?2,um?2,xm?1}\left\{x_{0}, u_{0}, \ldots, x_{m-2}, u_{m-2}, x_{m-1}\right\}{ x0?,u0?,��,xm?2?,um?2?,xm?1?}����ʷ����(xm?1,um?1,xm)\left(x_{m-1}, u_{m-1}, x_{m}\right)(xm?1?,um?1?,xm?)��ת��֮���ܳɱ�����J(x0)J\left(x_{0}\right)J(x0?) �Ĺ��Ƶõ���m��m��(xm?1,um?1,xm)\lambda^{m} \gamma^{m} \delta\left(x_{m-1}, u_{m-1}, x_{m}\right)��m��m��(xm?1?,um?1?,xm?)�ĸ��£� ��Ϊ�ӵ�ǰ��mmm�����ɵ���ʼ״̬x0x_{0}x0?���ٲ��ֹ��ס���ˣ����ǿ��Խ�һ������һ������IJ����������õ���TD���
et(x):={�˦�et?1(x),if x��xt1,if x=xt(10.20)e_{t}(x):= \begin{cases}\lambda \gamma e_{t-1}(x), & \text { if } x \neq x_{t} \\ 1, & \text { if } x=x_{t}\end{cases} \tag{10.20}et?(x):={ ����et?1?(x),1,? if x��?=xt? if x=xt??(10.20)
TD?(��)\operatorname{TD}(\lambda)TD(��) �㷨���㷨13�и�����

ͼ17˵����TD (��)(\lambda)(��)���µĻ��ơ�

ͼ17��TD?(��)\operatorname{TD}(\lambda)TD(��)���µ�˵��������������k:=\delta_{k}:=��k?:= ��(xk,uk,xk+1)\delta\left(x_{k}, u_{k}, x_{k+1}\right)��(xk?,uk?,xk+1?)��ʾʱ��TD�Թ�ȥ��Ӧ״̬�ĸ��·���ȡ���ڵ�ǰʱ�����Ҫ���µ�״̬֮���ʱ�䲽�衣
10.4 ʵ��:���������е����ؿ������������TD(0)\mathrm{TD}(0)TD(0)�㷨
����ͼ��ʾ��һ����������һ����11��״̬��һ���ϰ������������������½ǵ� "��ʼ "״̬������ͣ�������ն�״̬��

���ĸ����õĶ������ϡ��¡����ҡ�ÿ��������������ģ�һ���ĸ���Ϊ0.8�������ĸ���Ϊ0.2�����������ķ�������ת���ľֲ��ɱ�Ϊ0.04���ն�״̬�ľֲ��ɱ�Ϊ1��
����1��һ�������˹��ɸ��ʣ����ǾͿ�������ǰһ��ʵ��DP�㷨���������������������״̬���ܳɱ�ʵʩ��ֵ������
����2������һ���̶��IJ��ԣ����ǿ�����MC����������������״̬���ܳɱ�ʵʩMC PE��
����3������һ���̶����ԣ�������״̬���ܳɱ�ʵʩTD (0)(0)(0)��
����4����������ʵʩSARSA��Q-learning��
�ֵ�(Dictionary) :
keys()�������б�����һ���ֵ����еļ���
������set��: ��һ������IJ��ظ�Ԫ�����С�����ʹ�ô�����
{ }����set()�����������ϣ�ע�⣺����һ���ռ��ϱ�����set()������{ }����Ϊ{ }����������һ�����ֵ䡣
reversed()��������һ����ת�ĵ�������
reverse()�������ڷ����б���Ԫ�ء�
10.4.1 �����
���ȶ�������������һ��class��
class GridWorld: def __init__(self, width=4, height=3, obstacle=[(1,1)]):self.width = widthself.height = heightself.obstacle = obstacleself.terminal = [(0, width-1), (1, width-1)] # the terminal states are always at right top# the current stateself.row = height - 1 # the start point is always at left bottomself.col = 0# define the MDPself.actions = self.act_space()self.states = set(self.actions.keys()) | set(self.terminal)self.J = self.init_J()self.local_cost = 0.04def act_space(self):""":return: generate all possible actions for each state, dictionary"""act_space = {
}for row in range(self.height):for col in range(self.width):possible_acts = []if (row, col) not in self.obstacle + self.terminal:if row - 1 >= 0 and (row-1, col) not in self.obstacle:possible_acts.append('U')if row + 1 < self.height and (row+1, col) not in self.obstacle:possible_acts.append('D')if col - 1 >=0 and (row, col-1) not in self.obstacle:possible_acts.append('L')if col + 1 < self.width and (row, col+1) not in self.obstacle:possible_acts.append('R')act_space[(row, col)] = possible_actsreturn act_spacedef init_J(self, init_J_value=0):"""initialise the cost function:param init_J_value::return: cost in each state, dictionary"""J = {
}for row in range(self.height):for col in range(self.width):if (row, col) not in self.obstacle + self.terminal:J[(row, col)] = init_J_valueJ[self.terminal[0]] = -1 # J(x_N) = g(x_N)J[self.terminal[1]] = +1return Jdef move(self, action, deterministic=False):"""return the current cost after the move:param action: actions:param deterministic: if the action is deterministic:return: current cost"""# check if legal move firstif action in self.actions[(self.row, self.col)]:if action == 'U':# probablistic transitionif deterministic or random.uniform(0,1) > 0.8 or (self.row-2, self.col) not in self.states:self.row -= 1else:self.row -= 2elif action == 'D':if deterministic or random.uniform(0,1) > 0.8 or (self.row+2, self.col) not in self.states:self.row += 1else:self.row += 2elif action == 'R':if deterministic or random.uniform(0,1) > 0.8 or (self.row, self.col+2) not in self.states:self.col += 1else:self.col += 2elif action == 'L':if deterministic or random.uniform(0,1) > 0.8 or (self.row, self.col-2) not in self.states:self.col -= 1else:self.col -= 2if (self.row, self.col) == self.terminal[0]:return -1elif (self.row, self.col) == self.terminal[1]:return +1else:return self.local_costdef set_state(self, s):self.row = s[0]self.col = s[1]def current_state(self):return (self.row, self.col)def game_over(self): # MCreturn (self.row, self.col) not in self.actionsdef print_J(self):for row in range(self.height):print("---------------------------")for col in range(self.width):J = env.J.get((row, col), 0)if J >= 0:print(" %.2f|" % J, end="")else:print("%.2f|" % J, end="") print("")print("---------------------------")
10.4.2 Task 1: DP �㷨
## %% Task 1: Value Iteration
env = GridWorld()
gamma = 0.9while True:infty_norm = 0for x in env.actions: # update total costs for all the states except terminals# actions is a dict whose keys are states except terminalsold_J = env.J[x]J_dict = {
}for u in env.actions[x]: # find the optimal action for T_genv.set_state(x)g = env.move(u, deterministic=True)J_ = 0.8 * (g + gamma * env.J[env.current_state()])if env.current_state() not in env.terminal: # considering the SDMif u in env.actions[env.current_state()]:g = env.move(u, deterministic=True)J_ += 0.2 * (g + gamma * env.J[env.current_state()])else:J_ += 0.2 * (g + gamma * env.J[env.current_state()])else:J_ += 0.2 * (g + gamma * env.J[env.current_state()])J_dict[u] = J_optimal_act = min(J_dict.keys(), key=(lambda k: J_dict[k])) # optimal Bellman Eqenv.J[x] = J_dict[optimal_act]infty_norm = max(infty_norm, abs(old_J - env.J[x]))if infty_norm < 1e-3:breakprint("\nTotal cost by VI:")
env.print_J()
�����
Total cost by VI:
---------------------------
-1.54|-1.72|-1.90|-1.00|
---------------------------
-1.34| 0.00|-1.67| 1.00|
---------------------------
-1.20|-1.27|-1.50|-1.27|
---------------------------
10.4.3 Task 2: ���ؿ���MC�㷨
## Task 2: Monte Carlo Policy Evaluation
# %% Monte Carlo
def play_game(grid, policy):# start at random position to measure value for all states start_states = list(grid.actions.keys())start_idx = np.random.choice(len(start_states))grid.set_state(start_states[start_idx])# generate the trajectroyx = grid.current_state()traj = [(x, 0)]while not grid.game_over():u = policy[x]g = grid.move(u)x = grid.current_state()traj.append((x, g)) # save the trajectory# calculate G_pi for each states along the trajectoryG = 0G_x = []first = Truefor x, g in reversed(traj):if first:first = Falseelse:G_x.append((x, G))G = g + gamma * GG_x.reverse()return G_xenv = GridWorld()policy = {
(2, 0): 'U',(1, 0): 'U',(0, 0): 'R',(0, 1): 'R',(0, 2): 'R',(1, 2): 'R',(2, 1): 'R',(2, 2): 'R',(2, 3): 'U',
}# Under a fixed policy, the trajectory can be easily generated. Then calculate the expected cost for each state.
# set a dictionary to store the G of each state
G_pi_x = {
}
for x in env.actions:G_pi_x[x] = []for n in range(1, 200):G_pi_history = play_game(env, policy)for s, G in G_pi_history:G_pi_x[s].append(G)env.J[s] = np.mean(G_pi_x[s])print("\nTotal cost by MC:")
env.print_J()
���Ϊ
Total cost by MC:
---------------------------
-0.86|-0.98|-1.00|-1.00|
---------------------------
-0.73| 0.00| 1.00| 1.00|
---------------------------
-0.70|-0.53|-0.67|-0.73|
---------------------------
10.4.4 Task 3: ʱ�����㷨TD(0)
## task 3 : TD(0) algorithm
# %% TD
def play_game(grid, policy):start_states = list(grid.actions.keys())start_idx = np.random.choice(len(start_states))grid.set_state(start_states[start_idx])# generate trajx = grid.current_state()traj = [(x,0)]while not grid.game_over():u = policy[x]g = grid.move(u)x = grid.current_state()traj.append((x, g)) # save the trajectoryreturn trajgamma = 0.9
alpha = 0.1policy = {
(2, 0): 'U',(1, 0): 'U',(0, 0): 'R',(0, 1): 'R',(0, 2): 'R',(1, 2): 'R',(2, 1): 'R',(2, 2): 'R',(2, 3): 'U',
}env = GridWorld()
for _ in range(200):traj_all = play_game(env, policy)for idx in range(len(traj_all) - 1):x, _ = traj_all[idx]x_, g = traj_all[idx+1]env.J[x] = env.J[x] + alpha * (g + gamma * env.J[x_] - env.J[x])print ("\nTotal cost by TD")
env.print_J()
���Ϊ
Total cost by TD
---------------------------
-1.63|-1.80|-1.90|-1.00|
---------------------------
-1.17| 0.00| 1.75| 1.00|
---------------------------
-0.86|-0.86|-0.85|-1.31|
---------------------------
10.4.5 SARSA ��Q-learning
������