正点原子的ALIENTEK遥控器
用户码00ff
16进制键值码表
45??? 46??? 47
44??? 40??? 43
07??? 15??? 09
16??? 19??? 0d
0c??? 18??? 5e
08??? 1c???? 5a
42????????? 4a
?
?
红外接收管? 通用型即可
?
?---------------------------------------
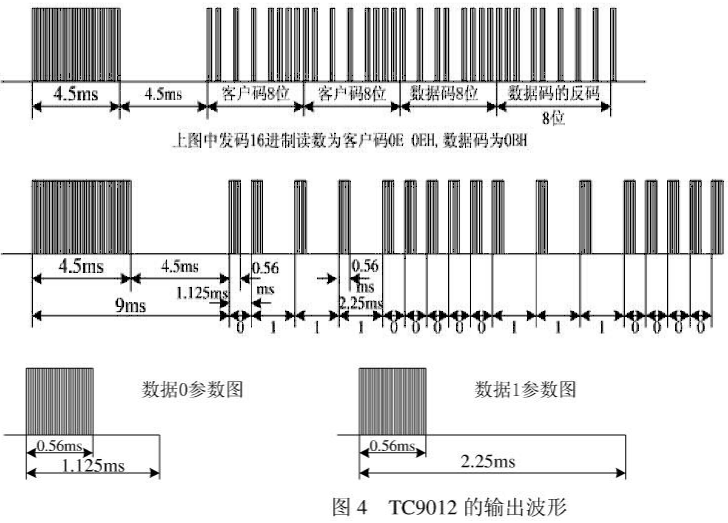
下面是类似的波形图,这个是网上找的,图片较大,缩小后看上去有些模糊,不过没关系,数据手册上一般都有
?
遥控器在发射红外信号之前,我们的mcu已经开启了定时器
在定时器中断函数中的全局变量irTimeCounts++ 一直在自加
irTimeCounts多长时间加一次? 或者说多长时间进入一次定时器中断函数呢?
在方式2时,t=256*12/11059200 约为277.78us
============================================================
1.对于1.125ms的时间,timer0会中断1.125/t=4.05次 也就是要5次,算上各种误差,(顶多5次,至少4次)
2.对于2.25ms 的时间,timer0会中断 2.25/t=8.1次, 也就是要9次,算上各种误差,(顶多9次,至少8次)
? 对于这里的次数,比N次小一点,就是N次,比N次大一点,就是N+1次,因为不会有半次,
? 误差给它正负0.4次足够了,给了误差后再算次数,直接舍入就行
那么我们就检测irTimeCounts的值,
如果小于6或7,那么接收到的数据为0
如果大于6或7,那么接收到的数据为1
从计算结果来看,我觉得0.56,1.125,2.25这些值的出现是比较合理的,
能有效避免由于器件误差和环境造成的数据误判,而且计算也方便
?
#include "my51.h"#include "ir.h"#include "smg.h"void main(){ timer0Init(); //定时器0初始化 int0Init(); //外部中断0初始化 while(1) { if(irTimeCountsArrProcess()) //如果成功接收并解析完成一帧数据 { //就让蜂鸣器响一下 beep=0; //蜂鸣器开启 led4=~led4; //4号灯反转一下 } displaySMG(irCodeByteDataProcessForSmg());//显示 beep=1; //蜂鸣器关闭 //由于displaySMG()函数执行时间较短,故蜂鸣器响声时间也较短,听到滴了一下 }}?
#ifndef _51IR_H_#define _51IR_H_#include "my51.h"extern u8 data smgWela[7]; //数码管显示的数据extern void int0Init(); //外部中断0初始化extern void timer0Init(); //定时器0初始化extern bool irTimeCountsArrProcess(); //成功解析一帧中断数据返回TRUEextern u8* irCodeByteDataProcessForSmg();//将遥控器码值处理成数码管可显示数据#endif
?
#include "ir.h"u8 irTimeCounts=0; //定时器0在方式2下8位自动重装时的中断计数值u8 irTimeCountsArr[32]={0}; //存放红外接收数据时的中断次数记录值,u8 bitNum=0; //标志当前接收的是第几个比特位u8 irReceFlag=0; //红外接收一帧数据未完成标志,为1时完成u8 irCodeByteData[4]={0}; //保存接收到的4个字节的有效数据u8 irTimeCountsArrProcessOk=0;//对接收到的33位数据处理未完成标志,1完成void int0Init(); //外部中断0初始化void timer0Init(); //定时器0初始化bool irTimeCountsArrProcess(); //解析中断次数,即解码u8* irCodeByteDataProcessForSmg();//将遥控器码值处理成数码管可显示数据u8* irCodeByteDataProcessForSmg() //将解码的4字节数据处理成数码管可显示的数据{ if(irTimeCountsArrProcessOk) //检测一帧数据是否解析完成 { //这里的用户码只显示低八位,因为高八位反正都是00(手上2个遥控器都是00) //然后还显示遥控键值及其反码,我们的数码管只有6位,只显示3字节数据 if(irCodeByteData[2]+irCodeByteData[3]!=0xff)//校验数据的完整性 { //最后一个字节是键码的反码 led6=0; //调试代码 } else { smgWela[0]=irCodeByteData[1] >> 4 ; //取高4位 smgWela[1]=irCodeByteData[1] & 0x0f; //取低4位 smgWela[2]=irCodeByteData[2] >> 4 ; smgWela[3]=irCodeByteData[2] & 0x0f; smgWela[4]=irCodeByteData[3] >> 4 ; smgWela[5]=irCodeByteData[3] & 0x0f; smgWela[6]=0xff; //小数点全不显 } irTimeCountsArrProcessOk=0;//标志清零,下一次有未解析的数据时才会再解析 } return smgWela;}bool irTimeCountsArrProcess() //对接收到的32位的中断次数数据进行解析{ u8 i,j,k,value=0; if(irReceFlag) //检测是否已经接收到新的4字节的红外通信数据 { for(j=0;j<4;j++) //有4个字节 { for(i=0;i<8;i++) //对每个字节的8位数据处理 { value>>=1; if(irTimeCountsArr[k++]>6) //这里我们用6或7都是可以的 { value|=0x80; //大于6的话该位数据是1 } } irCodeByteData[j]=value;//保存该字节,也就是遥控器的键码 } irReceFlag=0; //接收标志清零,这样就会等到下次收到数据后才会再解析 irTimeCountsArrProcessOk=1; //中断数据解析完毕标志置1 return TRUE; //解析完成 } return FALSE; //未进行解析,该返回值主要是为了方便外部文件调用时判断的 }void int0() interrupt 0//外部中断0{ if(irTimeCounts>30) //9ms的话中断32.4次,30这个取值差不多就可以了,不用太精确 { //这里9ms引导码需要timer0中断irTimeCounts=9*11059.2/(256*12)=32.4次 bitNum =0; irTimeCounts=0;//为接收第0位数据做准备 return; //丢弃引导码,反正不是有效数据0或1的都丢弃,直接返回 } irTimeCountsArr[bitNum]=irTimeCounts; //将中断次数数据存储起来 irTimeCounts=0; //存好了就立即清零,这样不会影响下一位数据的接收 bitNum++; //继续下一位 if(32==bitNum) //32位数据已经接收完成(0~31已经存储) { bitNum=0; //清零,这里不清也可以,反正引导时也会清 irReceFlag=1; //接收完成标志 } }void timer0() interrupt 1 //定时器0中断函数{ irTimeCounts++; //注:该值最大为255}void timer0Init() //定时器0初始化{ //配置工作方式寄存器,且不影响定时器1的状态 TMOD &= 0xf0; //保留定时器1的配置,并清除定时器0的配置 TMOD |= 0X02; //使用定时器0的工作方式2 TH0=0X00; TL0=0X00; //工作方式2是8位自动重装 ET0=1; //打开定时器 EA=1; //打开总中断 TR0=1; //启动定时器0}void int0Init() //外部中断0初始化{ IT0=1; //配置外部中断0的触发方式为 跳变延触发 EX0=1; //打开外部中断0 EA=1; //打开总中断 }?
#ifndef _51SMG_H_#define _51SMG_H_#include "my51.h"sbit dula =P2^6; //段选锁存器控制 控制笔段sbit wela =P2^7; //位选锁存器控制 控制位置extern u8 data smgWela[7]; //第一位到第六位,最后一个是小数点位置控制#define dark 0x11//0x11是第17号元素,0x00是低电平,数码管不亮,即table[17]#define dotDark 0xff //小数点全暗void displaySMG(u8* pWela); //数码管显示函数,参数是数组指针#endif
?
#include "smg.h"#include "my51.h"static u8 code table[]= { //0~F外加小数点和空输出的数码管编码 0x3f , 0x06 , 0x5b , 0x4f , // 0 1 2 3 0x66 , 0x6d , 0x7d , 0x07 , // 4 5 6 7 0x7f , 0x6f , 0x77 , 0x7c , // 8 9 A B 0x39 , 0x5e , 0x79 , 0x71 , // C D E F 0x80 , 0x00 , 0x40 // . 暗 负号 暗即不显示是第17索引号 }; //负号为第18索引号元素/* 由于此表只能一次显示一个小数点,故已注释掉,仅供查询 例如想要第一个和第六个数码管小数点同时点亮, 则执行 pWela->dot = 0xfe & 0xdf 即可 u8 code dotTable[]={ //小数点位置,某一位置0时,小数点亮 0xff , //那么全暗就是0xff 0xfe , 0xfd , 0xfb , //1 2 3 0xf7 , 0xef , 0xdf //4 5 6 };*/u8 data smgWela[7]={0,0,0,0,0,0,0}; //第一位到第六位,最后一个是小数点位置控制//P0口的数码管位选控制锁存器只用了低6位,我们保留高2位的数据,留作它用void displaySMG(u8* pWela){ u8 i=0; //控制6位数码管显示函数,不显示的位用参数dark u8 preState=P0|0x3f; //保存高2位状态,其中最高位是ADC0804的片选信号 wela=0;dula=0;_nop_();//先锁定数据,防止吴亮及位选锁存器高2位数据被改变 P0=0; //由于数码管是共阴极的,阳极送低电平,灯不亮 dula=1;_nop_(); dula=0; //段选数据清空并锁定 P0=preState; //共阴极数码管是阴极置高不亮,低6位置1,高2位保留 wela=1;_nop_(); //注:wela和dula上电默认为1 wela=0; //位选锁定,初始保留高2位的数据,低6位置高不亮 for(i=0;i<6;i++) //显示6位数码管 { P0=table[pWela[i]]|(((1<<i) & pWela[6])?0x00:0x80); dula=1;_nop_(); //送段数据,叠加小数点的显示,0x00点亮小数点 dula=0; P0=preState&~(1<<i); //不影响高2位数据,低6位是数码管位选,低电平有效 wela=1; _nop_(); //送位选号 wela=0; delayms(1); //稍作延时,让灯管亮起来 { //消除叠影及误亮,阴极置1不亮,低6位置1,高2位保留并锁定 P0=preState; wela=1; _nop_(); wela=0; } }}?