1.ROSжаЩуЯёЭЗЕФЪЙгУ
ДДНЈвЛИіcatkinЙЄзїПеМфЃК
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspaceБрвыЙЄзїПеМфЃК
cd ~/catkin_ws/
catkin_make ЃЈетРяПЩвджИЖЈЬиЖЈЕФАќНјааБрвыБШШчЃКcatkin_make -DCATKIN_WHITELIST_PACKAGES="webots_ros"ЃЉ
source devel/setup.bashЯТдиЩуЯёЭЗдДТыhttps://github.com/ros-drivers/usb_cam
НЋАќНтбЙВЂЗХШыЩЯУцЕФsrc

#ДђПЊвЛИіДАПкЦєЖЏros
roscore
#НјШыЕНИеВХДДНЈЕФЙЄзїПеМф
cd catkin_ws
#Брвы
catkin_make
#аТДђПЊвЛИіДАПкВтЪдЩуЯёЭЗ
roslaunch usb_cam usb_cam-test.launchЩуЯёЭЗВЮЪ§ПЩдкusb_cam-test.launchИќИФ


дйДђПЊвЛИіДАПкЪфШыrqt_graphВщПДЯћЯЂЃЌПДЕНusb_camНкЕуЯђ/usb_cam/image_rawЗЂВМСЫЯћЯЂЃЌimage_viewЖЉдФСЫИУЯћЯЂЃЌЯћЯЂФкШнМДЮЊЭМЯёжЁЃЌгЩimage_viewЯдЪО

2.ЕЅФПЯрЛњЕФБъЖЈ
ВЮПМСДНгЃКhttps://blog.csdn.net/zhangqian_shai/article/details/86705754
#noeticЩуЯёЭЗБъЖЈЙЄОпАВзА
sudo apt-get install ros-noetic-camera-calibration
#ЦєЖЏЩуЯёЭЗ
roslaunch usb_cam usb_cam-test.launch
#ПЊЪМБъЖЈ
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.024 image:=/usb_cam/image_raw camera:=/usb_camcameracalibrator.py БъЖЈГЬађашвЊвдЯТМИИіЪфШыВЮЪ§ЁЃ
1ЃЉsize:БъЖЈЦхХЬИёЕФФкВПНЧЕуИіЪ§ЃЌетРяЪЙгУЕФЦхХЬвЛЙВгаЖрЩйааЃЌУПаагаИіФкВПНЧЕуЁЃ
2ЃЉsquare:етИіВЮЪ§ЖдгІУПИіЦхХЬИёЕФБпГЄЃЌЕЅЮЛЪЧУзЁЃ
3ЃЉimageКЭcamera:ЩшжУЩуЯёЭЗЗЂВМЕФЭМЯёЛАЬтЁЃ
АДееxЃЈзѓгвЃЉЁЂyЃЈЩЯЯТЃЉЁЂsizeЃЈЧАКѓЃЉЁЂskewЃЈЧуаБЃЉЕШЗНЪНвЦЖЏЦхХЬЃЌжБЕНx,y,size,skewЕФНјЖШЬѕЖМБфГЩТЬЩЋЮЛжУЁЃ
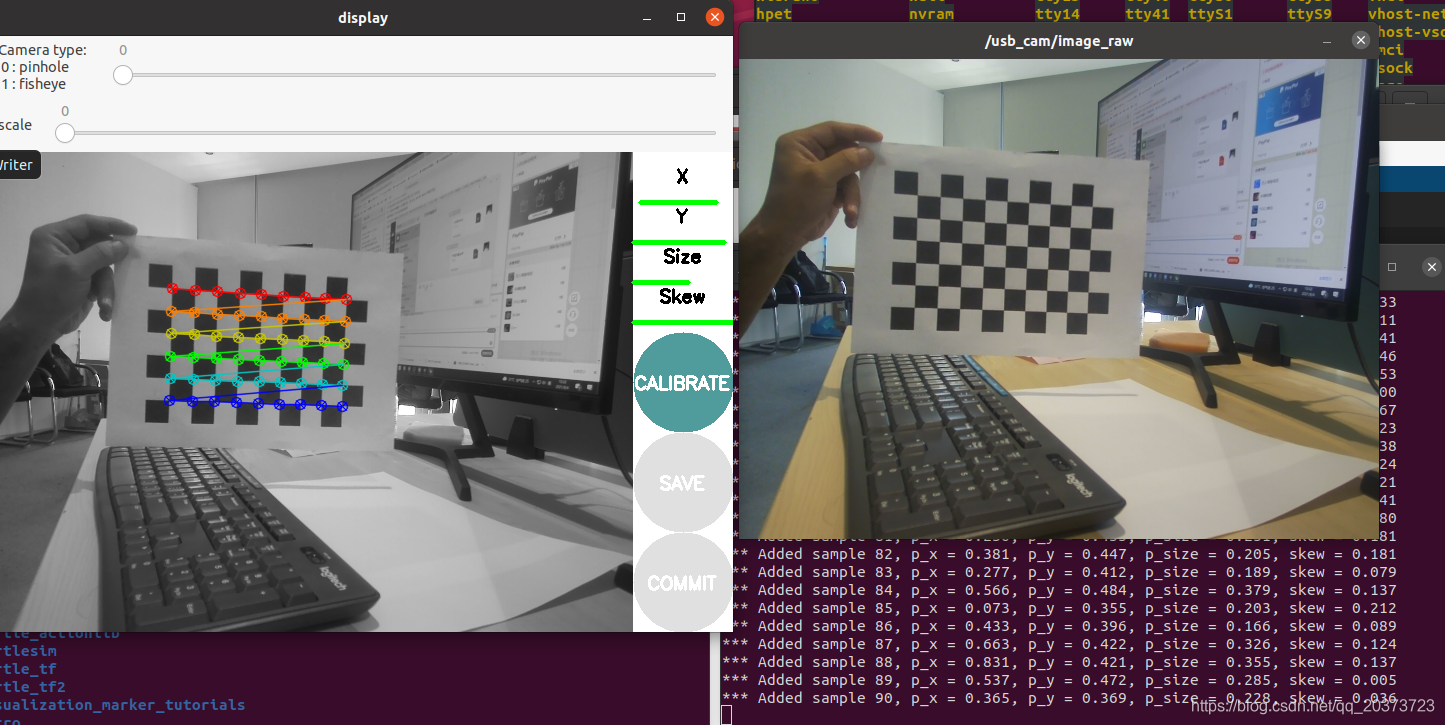
ИаОѕВюВЛЖрСЫОЭАДЯТCALIBRATEАДХЅЃЌЕШвЛЖЮЪБМфОЭПЩвдЭъГЩБъЖЈЁЃ
ЭъГЩКѓЕуЛїSAVE,ШЛКѓдйCOMMITЃЌдкжеЖЫКѓЛсгаБъЖЈНсЙћyamlЮФМўЕижЗЃЎДђПЊКѓЃЌАДееAsus.yamlЕФИёЪНаоИФЃЌУќУћЮЊxxЃЈУћзжздЖЈЃЉ.yamlЃЌИДжЦЕН/home/xxx/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3ФПТМЯТ,БъЖЈЭъГЩЁЃ

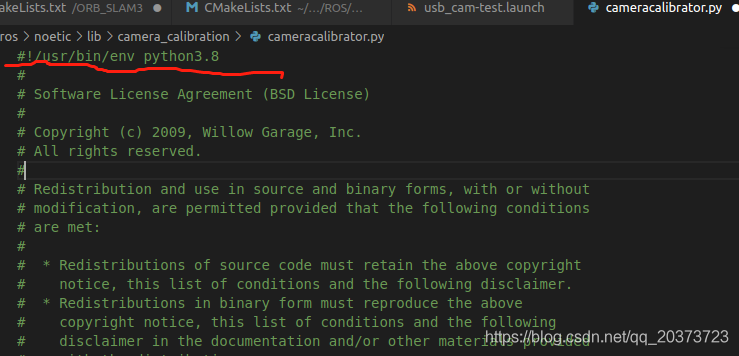
зЂвтЃКФЌШЯrosrunЪЧЕїгУ/usr/bin/pythonЃЌЕЋЪЧЮвЕФUbuntu20.04УЛгаФЧИіЮФМўЃЌжЛгаpython2ЃЌpython3ЃЌpython3.8ЃЌетИіЪБКђЮвОЭевЕН cameracalibrator.pyЮФМўЃЌе§ГЃЧщПіЯТЕФЮЛжУгІИУдк/opt/ros/noetic/lib/camera_calibration/cameracalibrator.pyЃЌРћгУsudo vim cameracalibrator.pyДђПЊБрМКѓЃЌАбЕквЛааИФЮЊЃК
3.ЫЋФПЯрЛњЕФБъЖЈ
cd catkin_ws/src
git clone https://github.com/ros-perception/image_pipeline.git
cd ..
rosdep install --from-paths src --ignore-src # АВзАimage_pipeline ЫљашЕФвРРЕ
catkin_makeгіЕНДђгЁаХЯЂЃКdeprecated pixel format used, make sure you did set range correctly
НтОіЗНЗЈЃЌВЮПМhttps://blog.csdn.net/elephant_why/article/details/103202631
{AVPixelFormat pixFormat;switch (avcodec_context_->pix_fmt) {case AV_PIX_FMT_YUVJ420P :pixFormat = AV_PIX_FMT_YUV420P;break;case AV_PIX_FMT_YUVJ422P :pixFormat = AV_PIX_FMT_YUV422P;break;case AV_PIX_FMT_YUVJ444P :pixFormat = AV_PIX_FMT_YUV444P;break;case AV_PIX_FMT_YUVJ440P :pixFormat = AV_PIX_FMT_YUV440P;break;default:pixFormat = avcodec_context_->pix_fmt;break;}avcodec_context_->pix_fmt = pixFormat;}

ЮвгУЕФЦеЭЈЩуЯёЭЗЃЌУЛгаЯёrealsenseФЧбљгазЈУХЕФЙЄОпАќЃЌЫЋФПБъЖЈвЛжБгаЮЪЬтЃЌЯЃЭћПДЕНЕФИјЮвИіжИв§