Йо¶ИПа»ъДЪІОєНємНвПа»ъКЗТ»СщµДЎЈЅсМмАґС§П°Т»ПВИзєОНЁ№эkinectµДAPIЗуµГДЪІОЎЈ
ґъВлЈє
#include "kinect.h"
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>#include <fstream> using namespace cv;
using namespace std;
// °ІИ«КН·ЕЦёХл
template<class Interface>
inline void SafeRelease(Interface *& pInterfaceToRelease)
{if (pInterfaceToRelease != NULL){pInterfaceToRelease->Release();pInterfaceToRelease = NULL;}
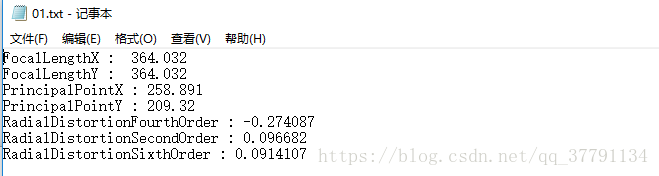
}int main() {int flag = 1;// »сИЎKinectЙи±ёIKinectSensor* m_pKinectSensor;// УіЙдЖчICoordinateMapper* m_pCoordinateMapper = NULL;HRESULT hr;hr = GetDefaultKinectSensor(&m_pKinectSensor);if (FAILED(hr) ){return hr;}IMultiSourceFrameReader* m_pMultiFrameReader = NULL;if (m_pKinectSensor){hr = m_pKinectSensor->Open();if (SUCCEEDED(hr)){// »сИЎ¶аКэѕЭФґµЅ¶БИЎЖч hr = m_pKinectSensor->OpenMultiSourceFrameReader(FrameSourceTypes::FrameSourceTypes_Color |FrameSourceTypes::FrameSourceTypes_Infrared |FrameSourceTypes::FrameSourceTypes_Depth,&m_pMultiFrameReader);}}if (!m_pKinectSensor || FAILED(hr)){return E_FAIL;}// ИэёцКэѕЭЦЎј°ТэУГIInfraredFrame* m_pInfraredFrame = NULL;IDepthFrame* m_pDepthFrame = NULL;IColorFrame* m_pColorFrame = NULL;CameraIntrinsics* m_pCameraIntrinsics = new CameraIntrinsics();hr = m_pKinectSensor->get_CoordinateMapper(&m_pCoordinateMapper);if (FAILED(hr)){return hr;}//µГµЅДЪІОwhile (flag==1) {//»сИЎЙо¶ИПа»ъДЪІО(ТЄєГјёЗ§ЦЎХХЖ¬ІЕДЬµГµЅЈ¬·сФтКэѕЭИ«ІїОЄ0)m_pCoordinateMapper->GetDepthCameraIntrinsics(m_pCameraIntrinsics);//GetDepthCameraIntrinsicsЈє»сµГirПа»ъІОКэЈЁіці§ТСРґИлЙи±ёЈ©if (m_pCameraIntrinsics->FocalLengthX && flag ==1) {// ґтУЎcout << "FocalLengthX : " << m_pCameraIntrinsics->FocalLengthX << endl; //ЙгПс»ъµДXЅ№ѕаЈ¬ТФПсЛШОЄµҐО»cout << "FocalLengthY : " << m_pCameraIntrinsics->FocalLengthY << endl; //Па»ъµДYЅ№ѕаЈ¬ТФПсЛШОЄµҐО»cout << "PrincipalPointX : " << m_pCameraIntrinsics->PrincipalPointX << endl;//Па»ъФЪXО¬ЦРµДЦчТЄµгЈ¬ТФПсЛШОЄµҐО»ЎЈcout << "PrincipalPointY : " << m_pCameraIntrinsics->PrincipalPointY << endl; //Па»ъФЪYЦбЙПµДЦчТЄµгЈ¬ТФПсЛШОЄµҐО»ЎЈcout << "RadialDistortionFourthOrder : " << m_pCameraIntrinsics->RadialDistortionFourthOrder << endl;//Па»ъµДЛДЅЧѕ¶Пт»ы±дІОКэЎЈcout << "RadialDistortionSecondOrder : " << m_pCameraIntrinsics->RadialDistortionSecondOrder << endl;//Па»ъµД¶юЅЧѕ¶Пт»ы±дІОКэЎЈcout << "RadialDistortionSixthOrder : " << m_pCameraIntrinsics->RadialDistortionSixthOrder << endl;//ЙгПс»ъµДБщЅЧѕ¶Пт»ы±дІОКэЎЈflag = 0;} }//±ЈґжµЅ01.txtОД±ѕofstream fout("01.txt"); ТФКдіц·ЅКЅґтїЄОДјю Из№ыПлТФКдИл/Кдіц·ЅКЅАґґтїЄЈ¬ѕНУГfstreamАґ¶ЁТеfout << "FocalLengthX : " << m_pCameraIntrinsics->FocalLengthX <<endl; //ПтОДјюРґИлКэѕЭfout << "FocalLengthY : " << m_pCameraIntrinsics->FocalLengthY << endl; //ПтОДјюРґИлКэѕЭfout << "PrincipalPointX : " << m_pCameraIntrinsics->PrincipalPointX << endl;//Па»ъФЪXО¬ЦРµДЦчТЄµгЈ¬ТФПсЛШОЄµҐО»ЎЈfout << "PrincipalPointY : " << m_pCameraIntrinsics->PrincipalPointY << endl; //Па»ъФЪYЦбЙПµДЦчТЄµгЈ¬ТФПсЛШОЄµҐО»ЎЈfout << "RadialDistortionFourthOrder : " << m_pCameraIntrinsics->RadialDistortionFourthOrder << endl;//Па»ъµДЛДЅЧѕ¶Пт»ы±дІОКэЎЈfout << "RadialDistortionSecondOrder : " << m_pCameraIntrinsics->RadialDistortionSecondOrder << endl;//Па»ъµД¶юЅЧѕ¶Пт»ы±дІОКэЎЈfout << "RadialDistortionSixthOrder : " << m_pCameraIntrinsics->RadialDistortionSixthOrder << endl;//ЙгПс»ъµДБщЅЧѕ¶Пт»ы±дІОКэЎЈ// №Ш±Хґ°їЪЈ¬Йи±ёcv::destroyAllWindows();m_pKinectSensor->Close();SafeRelease(m_pCoordinateMapper); // °ІИ«КН·ЕЦёХлSafeRelease(m_pKinectSensor);// °ІИ«КН·ЕЦёХлreturn 0;
}
APIЅйЙЬЈє
https://docs.microsoft.com/en-us/previous-versions/windows/kinect/dn785315(v=ieb.10)
°жИЁЙщГчЈє±ѕОДОЄІ©ЦчФґґОДХВЈ¬ОґѕІ©ЦчФКРнІ»µГЧЄФШЎЈhttps://blog.csdn.net/qq_37791134