������ַ ��https://www.stereolabs.com/
SDK���ص�ַ��https://www.stereolabs.com/developers/release/
�ĵ���https://www.stereolabs.com/docs/getting-started/
ROS������أ�https://github.com/stereolabs/zed-ros-wrapper
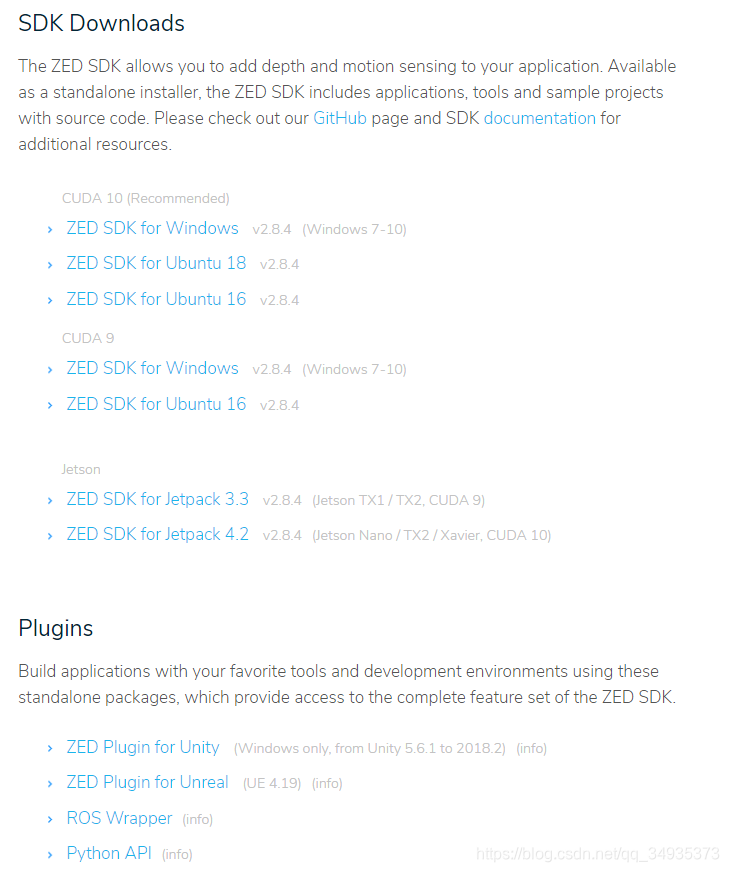
�������߶�ʮһ��������SDK�����п����õ����ĵ��������Ƽ��Ļ�����ubuntu16.04(�ں˰汾4.4.0) + cuda9���ϰ汾��
ʵ��ij����ǹ��ػ�linux14.04 + ROS1.0,ò��û���ҵ�ubuntu14,����ֱ��������2.8.4��SDK��������γ��ԣ�ʼ��û�гɹ�����һ�����������°��SDK2.8.4��װ�Ĺ�������ʾMD5 checksums erro��Ȼ���Ҵӹ������صĹ����в�û�����κζ�����������ubuntuϵͳ���ں˲�ƥ�䣬��ǰ���������ڵ�SDK ������û�б�MD5�Ĵ��ˣ���װ��������ʾ��Ҫcuda���������Ǿ�����γ��Ի��Dz��ɹ���������ԭ��һ����Ϊ��ȻϵͳΪubuntu14.04������cudaҪ��14.04ϵͳ���ں˰汾��3.3.0�����ҵ�ϵͳ�ں�ȴ��4.4.0�����������ֽ�������������ں˰汾��������ϵͳ���ο�����https://blog.csdn.net/pppp00qqqq/article/details/80715200��Ubuntu 14.04�����ں�https://blog.csdn.net/hongquan1991/article/details/55213360��
�ڶ�����Ҳ�����������������⣬�Ǿ���ʵ����ʹ�õ��л����ػ��Dz�����Ӣΰ������Կ��ģ�ֻ�м��ԣ�����cudaʼ��ûװ�ϡ�������ֻ���õ�ʦ��������Ӣΰ����ԵĹ��ػ����Ⱥ�����ʱ���ڲ���ROS+ZED�ѣ�Ŀǰֻ��ʹ���Լ���С�ʼDZ��������������
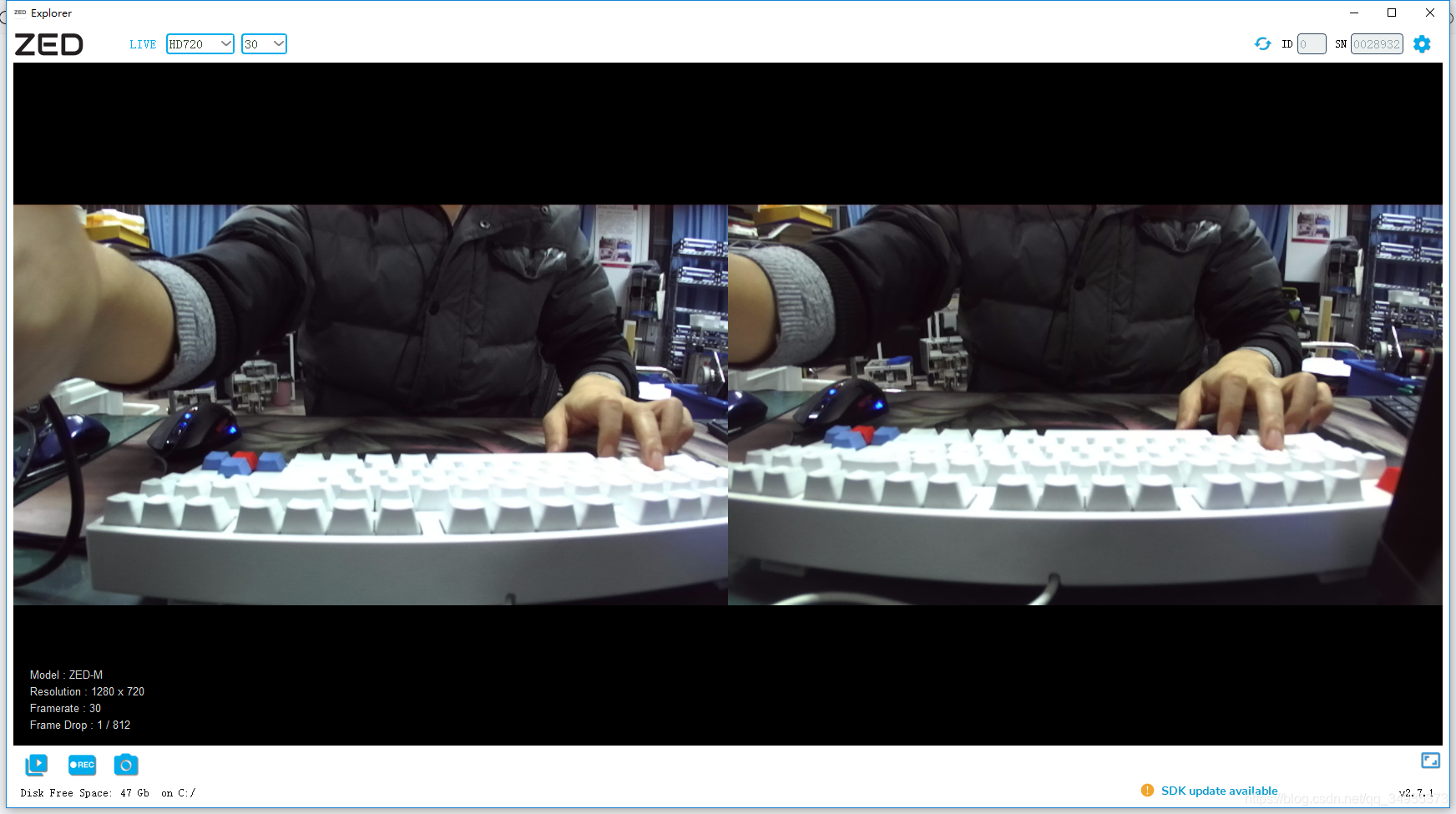
ʵ�黷��Windows10���������صĻ��ǹ������µ�SDK2.8.4��������β��ԣ���װ�����и��ֱ�������ʾ����dll��ȱ�٣����갲װһ��SDK����ô�����𡣡�������SDK2.7�İ汾�����⾹Ȼ��װ�ɹ��ˣ�û���κα���������ZED Explorer����ʾ�����°��SDK�����Ϻ��Բ����£�����˫Ŀ��USB������������
ZED��������Ը���˫Ŀ�IJ����������ͼ��������̼�������������ҪGPU�������㣬��Ҳ����ΪɶôSDK��Ҫ��װcuda��ԭ�����û���Կ����Կ���������װcuda����������ʹ�����ͼ��ġ�
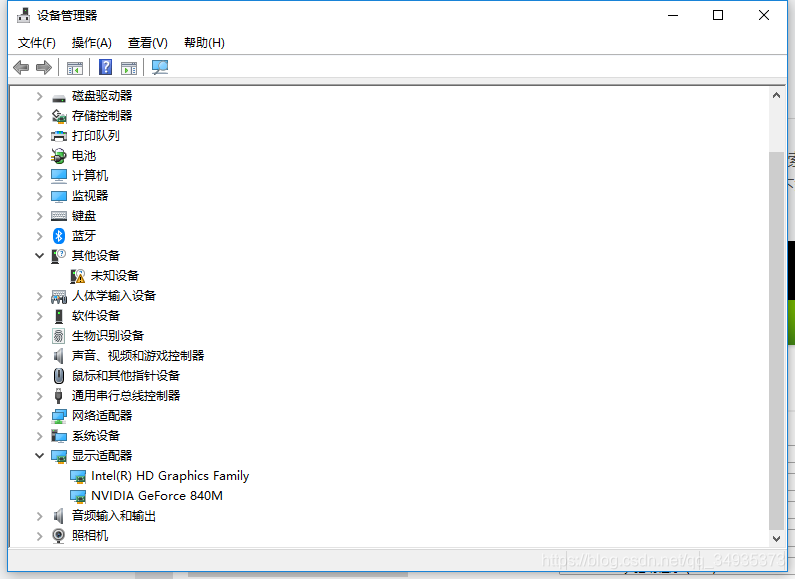
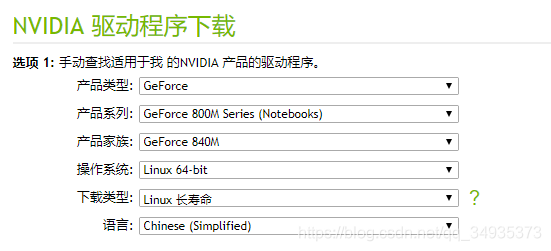
��װcuda9.0(ʵ�ڲ��Ұ�װ���°��cuda10��)����װ������Ƚ�ubuntu�ͼܶ��ˣ������������������Ұ�װ���֮������ZED Depth Viewer����������ͼ��û���������֣������Ų鷢������Ϊ�Կ�����û���������С���������������https://www.nvidia.cn/Download/index.aspx?lang=cn

��װ֮�������豸������-����ʾ������-��Geforce840M��������һ��ʼ���������ģ�˵����������������ġ�
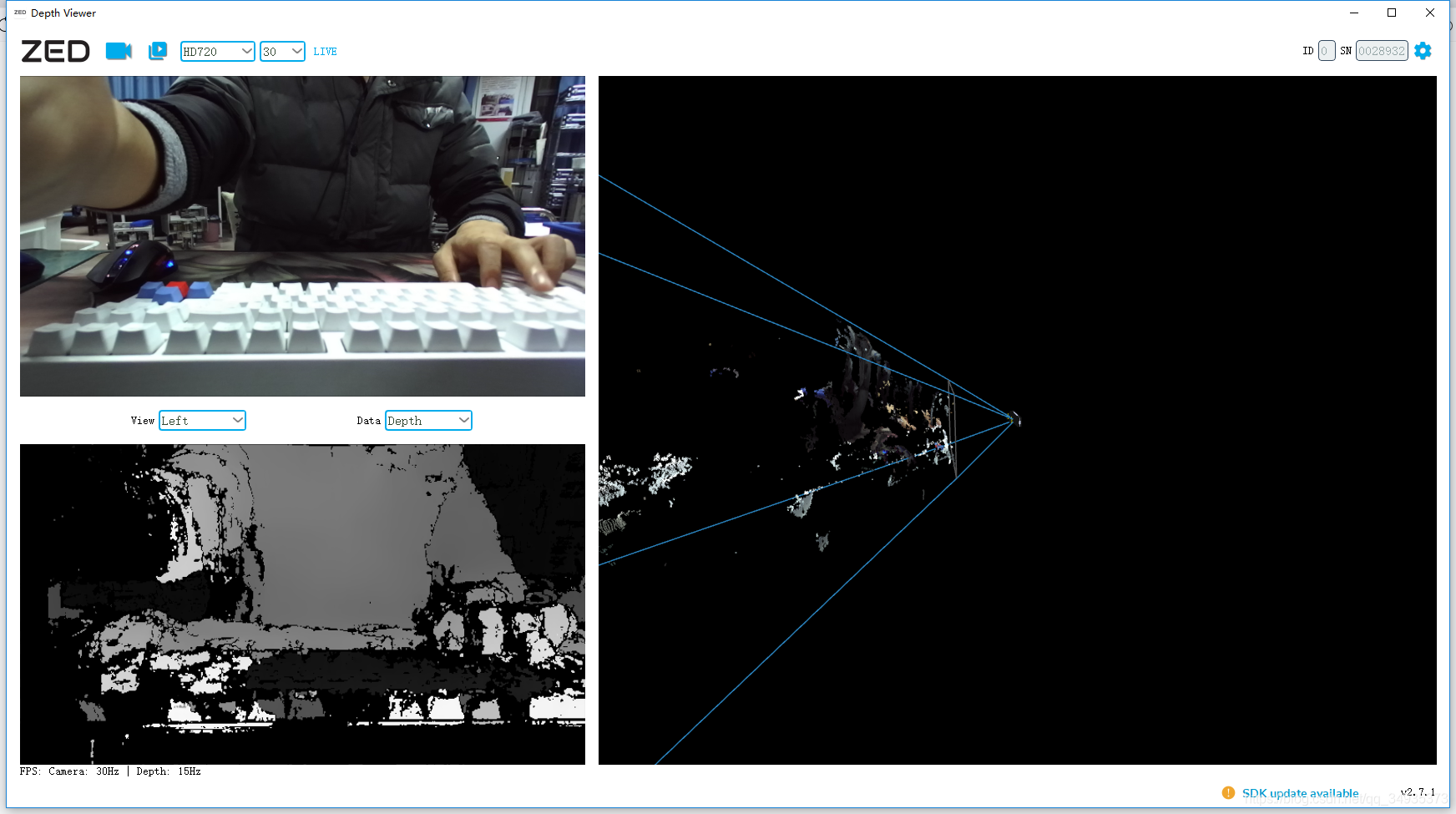
���´�ZED Depth Viewer�������Ҳ�Ľ������ͨ����갴ס�϶�����ʾ�Ƚ�����ľ�����Ϣ��
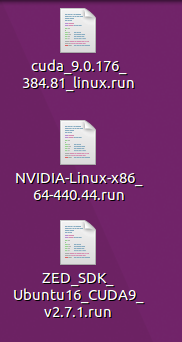
���Լ��ıʼDZ�����װ��win10+ubuntu16.04.6��˫ϵͳ��Ȼ������NVIDIA-Linux�µ��Կ�������������CUDA��SDK�����ٴβ���linuxϵͳ�µ�ZED�����װ��ʹ�á����յĴ���ΪWin10+Ubuntu16.04.6+GeForce840M�Կ�����+cuda9.0+ZED SDK2.7.�Կ������Լ����������ض�Ӧ�ļ���.
ֵ��ע���һ�����˫ϵͳ��װ�Կ�������Ҫ��װϵͳ��ʱ��ȫģʽ�رգ�������氲װ��������ʳ��������ǵ�һ��û�йرհ�ȫģʽ���ȵ�һ������֮����ʼ�����ɹ���Ȼ��ȥBIOS�رհ�ȫģʽ��ȴ�������ϵͳ����ˣ�����������ڰ�װϵͳ֮ǰ����BIOS���潫��ȫģʽ���á��ڶ����Ӿ���ubuntu16.04ϵͳ��װ��ʱ����һ��ѡ��ΪΪ������ͼ�κ����߰�װ��������һ�ΰ�װ��ʱ���ҹ�ѡ�ˣ�Ȼ���������ͻ(��ȷ���Ƿ������ԭ���µ�)���ڶ���û�й�ѡ����װ���̾�û�����ˣ������һ��ǽ��鲻Ҫ��ѡ���ѡ���װ��ɣ�����ϵͳ���Ķ����뷨�������ã�Ȼ�����ص��ļ�copy������
�Կ�������װ:
ж��ԭ������
sudo apt-get remove �Cpurge nvidia*����nouveau
sudo gedit /etc/modprobe.d/blacklist.conf��������ӣ�
blacklist nouveau
options nouveau modeset=0
�����˳��༭��ִ������IJ�����
sudo update-initramfs -u������ִ�У�
lsmod | grep nouveau��û��������ʾ���γɹ���1.���������н���Ctrl-Alt+F12.����X-Window����
sudo service lightdm stop #���ر�ͼ�ν���3.������run�ļ�����ִ��Ȩ��sudo chmod +x NVIDIA-Linux-x86_64-������.run4.��װ��sudo ./NVIDIA-Linux-x86_64-������.run �Cno-opengl-files �Cno-opengl-files ֻ��װ�����ļ�������װOpenGL�ļ��������������Ҫ��ѡ�������ͣ���ΪNVIDIA������Ĭ�ϻᰲװOpenGL����Ubuntu���ں˱���Ҳ��OpenGL������GUI��ʾϢϢ��أ�һ��NVIDIA��������д��OpenGL����GUI��Ҫ��̬����OpenGL���ʱ����������⡣
��װ������һЩѡ�
The distribution-provided pre-install script failed! Are you sure you want to continue? ѡ�� yes ������
Would you like to register the kernel module souces with DKMS? This will allow DKMS to automatically build a new module, if you install a different kernel later? ѡ�� No ����������Ĭ�ϼ��ɡ�
��װ��������Ҫѡ����������Ը����Լ�����Ҫѡ����������������ѡ��ֱ����ʾ�ɹ���װ��
5.Driver���ԣ�
nvidia-smi #���г�GPU����Ϣ�б�����ʾ������װ�ɹ�
nvidia-settings #���������öԻ������ʾ������װ�ɹ�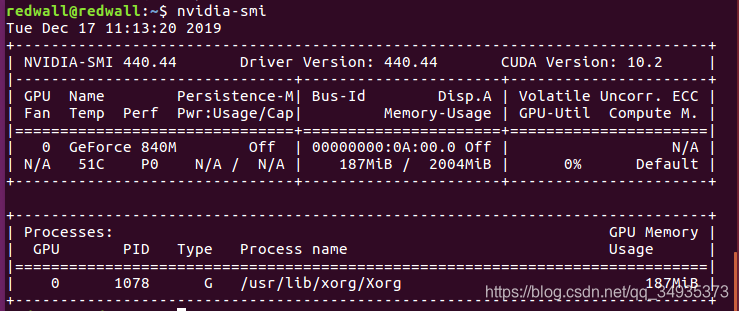
cuda toolkit��װ:
���������նˣ����밲װ��Ŀ¼����cuda toolkit��װ
sudo sh cuda_9.1.85_387.26_linux.run
ִ�д�����Լ1���Ӻ����ְ�װЭ��Ҫ�㿴���տ�ʼ��0%����һ��Ctrl + c��Ȼ������ʾ�������ɣ������� accept
Ȼ���Ƿ�װ�Կ�����ѡ��no !
Install NVIDIA Accelerated Graphics Driver for Linux-x86_64 387.26?
(y)es/(n)o/(q)uit: n
Install the CUDA 9.0 Toolkit?
(y)es/(n)o/(q)uit: y
����Ҫ����Driversѡ��no�� toolkit ѡ��yes�� ����ѡ����Լ�������ѡ��
��װ��ɺ�����ϵͳ
reboot
���cuda toolkit�Ƿ�װ�ɹ����ն����룺
nvcc -V
�����cuda�İ汾��Ϣ
���û���������sudo gedit ~/.bashrc��������ӣ�export LD_LIBRARY_PATH=/usr/local/cuda-9.0/lib64:$LD_LIBRARY_PATH
export PATH=/usr/local/cuda-9.0/bin:$PATHִ�У�
source ~/.bashrc��֤cuda��װ�Ƿ�ɹ���cd /usr/local/cuda-8.0/samples/1_Utilities/deviceQuerysudo make./deviceQuery
������������Ϣ����֤����װ�ɹ���./deviceQuery Starting...CUDA Device Query (Runtime API) version (CUDART static linking)Detected 1 CUDA Capable device(s)Device 0: "GeForce GTX TITAN X"CUDA Driver Version / Runtime Version 10.0 / 10.0CUDA Capability Major/Minor version number: 5.2Total amount of global memory: 12210 MBytes (12802785280 bytes)(24) Multiprocessors, (128) CUDA Cores/MP: 3072 CUDA CoresGPU Max Clock rate: 1076 MHz (1.08 GHz)Memory Clock rate: 3505 MhzMemory Bus Width: 384-bitL2 Cache Size: 3145728 bytesMaximum Texture Dimension Size (x,y,z) 1D=(65536), 2D=(65536, 65536), 3D=(4096, 4096, 4096)Maximum Layered 1D Texture Size, (num) layers 1D=(16384), 2048 layersMaximum Layered 2D Texture Size, (num) layers 2D=(16384, 16384), 2048 layersTotal amount of constant memory: 65536 bytesTotal amount of shared memory per block: 49152 bytesTotal number of registers available per block: 65536Warp size: 32Maximum number of threads per multiprocessor: 2048Maximum number of threads per block: 1024Max dimension size of a thread block (x,y,z): (1024, 1024, 64)Max dimension size of a grid size (x,y,z): (2147483647, 65535, 65535)Maximum memory pitch: 2147483647 bytesTexture alignment: 512 bytesConcurrent copy and kernel execution: Yes with 2 copy engine(s)Run time limit on kernels: YesIntegrated GPU sharing Host Memory: NoSupport host page-locked memory mapping: YesAlignment requirement for Surfaces: YesDevice has ECC support: DisabledDevice supports Unified Addressing (UVA): YesDevice supports Compute Preemption: NoSupports Cooperative Kernel Launch: NoSupports MultiDevice Co-op Kernel Launch: NoDevice PCI Domain ID / Bus ID / location ID: 0 / 1 / 0Compute Mode:< Default (multiple host threads can use ::cudaSetDevice() with device simultaneously) >deviceQuery, CUDA Driver = CUDART, CUDA Driver Version = 10.0, CUDA Runtime Version = 10.0, NumDevs = 1
Result = PASS��װZED SDK:
��ZED�������ػ��߿����Դ�����U�������ZED_SDK_Linux_Ubuntu16_v2.7.0.run�ļ�
Ȼ���ն˽�����ļ�·��
chomd +x ZED_SDK_Linux_Ubuntu16_v2.7.0.run
./ZED_SDK_Linux_Ubuntu16_v2.7.0.run���а�װ���ɡ�
����ʱ����/usr/local/zed/tools����./�ļ�����ʽ·������SDK�IJ�����λ�����ɡ�

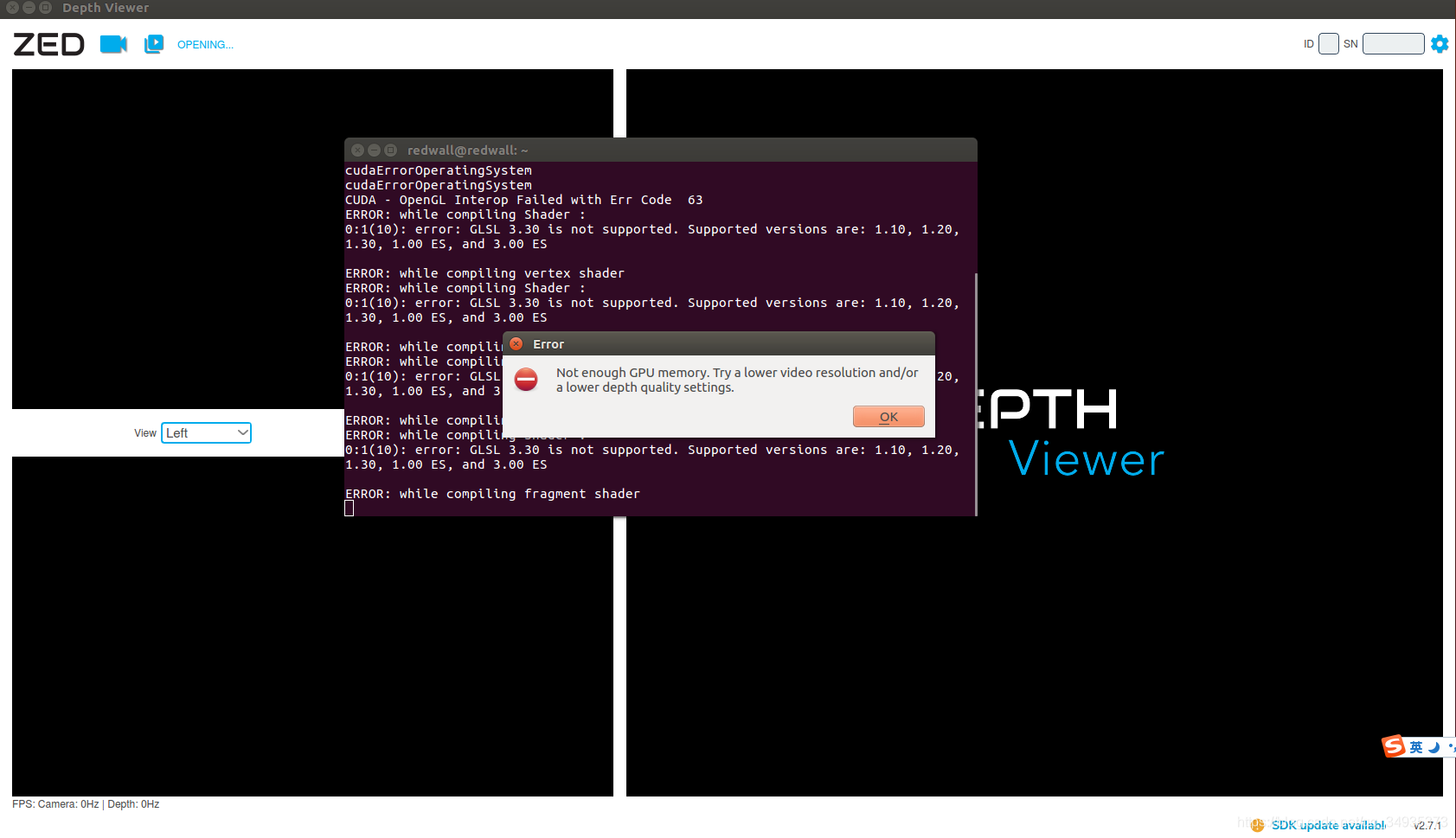
��װ֮����RGBͼ��̫������������opengl��Ⱦ�����⣬���ͼ������GPU�Դ治������ʾ���������dzɹ���˫ϵͳ�ϰ�װ������cuda+sdk�ˡ�
���¾㱸������������ROS��ʹ������ˣ�֮ǰʹ�õ�ROS������ubuntu14������indigo��������Ҫƥ���Կ�������SDK�İ汾����װ��ubuntu16.04����ô��Ӧ��ROS�汾ҲҪ���£��ο����ϵķ�����װ��ROS kinetic��Ȼ������ZED��ROS��Դ����ʹ�ã�
$ sudo apt install ros-kinetic-rviz-imu-plugin
$ cd ~/catkin_ws/src/ #use your current catkin folder
$ git clone https://github.com/stereolabs/zed-ros-wrapper.git
$ cd ..
$ catkin_make -DCMAKE_BUILD_TYPE=Release
$ echo source $(pwd)/devel/setup.bash >> ~/.bashrc
$ source ~/.bashrc��һ�����б�����
[display_zedmss.launch] is neither a launch file in package [zed_display_rviz] nor is [zed_display_rviz] a launch file name
The traceback for the exception was written to the log fileԭ����û��ִ��source /devel/setup.bash.
�ٴα������֮��ִ�У��ڶ��α�����
ERROR: cannot launch node of type [zed_wrapper/zed_wrapper_node]: can't locate node [zed_wrapper_node] in package [zed_wrapper]ԭ����zed_wrapper������µĽڵ�û�б���ɹ�����Ҫ��������ð������ɽڵ㡣
$ catkin_make -DCATKIN_WHITELIST_PACKAGES="zed_wrapper"�ٴ�ִ������ͨ����
����ZED_mini�ڵ�����:
$ roslaunch zed_wrapper zedm.launch
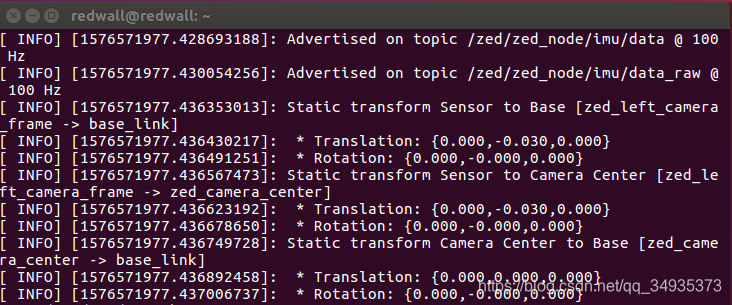
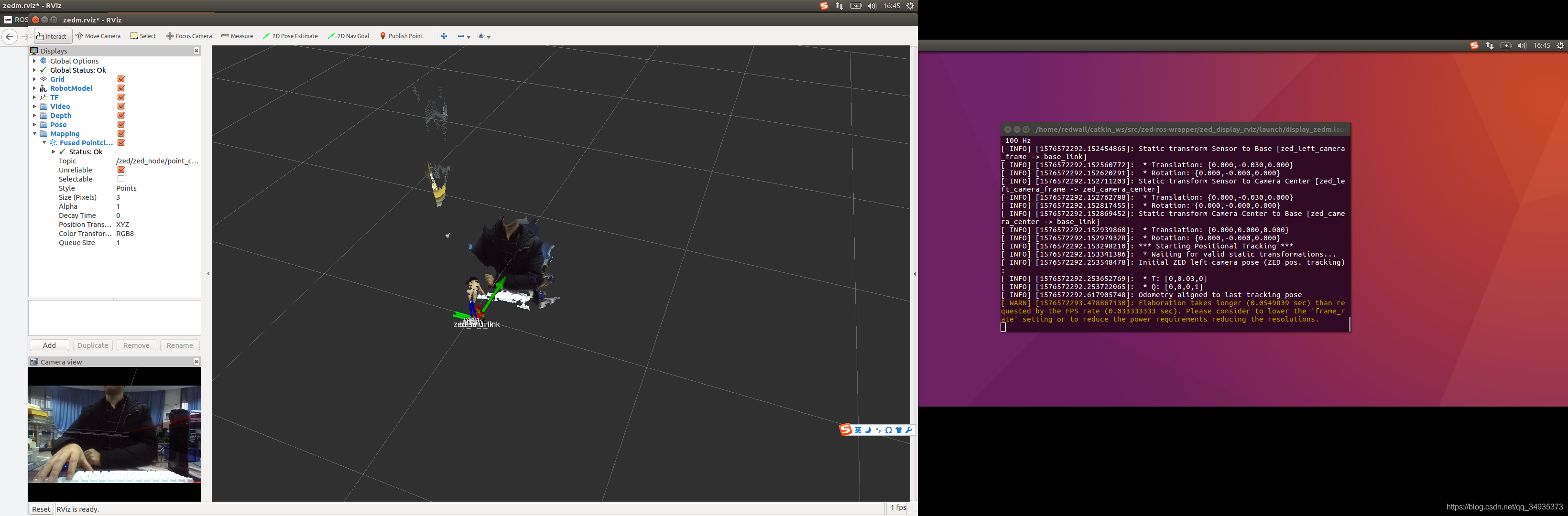
����ZED_mini�ڵ㲢ͨ��RVIZչʾЧ��
$ roslaunch zed_display_rviz display_zedm.launch